Artrocinematica e osteocinematica: quali differenze?
In questo articolo andiamo a vedere le differenze tra artrocinematica e osteocinematica.

Ognuno di noi può vedere i movimenti dei propri segmenti corporei, e sa che, all’interno delle articolazioni, se ne verificano altri, non osservabili, ma manualmente percepibili. Tali spostamenti tra i capi ossei sono guidati dalla forma delle superfici articolari – per la maggior parte curva, relativamente concava o convessa (1). La scienza che li studia è l’artrocinematica.
Cos’è l’artrocinematica?
L’artrocinematica (dal greco árthron = giuntura, articolazione e kínema –atos =movimento) è una parte della fisica che descrive in modo dettagliato gli spostamenti accessori di superfici articolari adiacenti (2). Questi avvengono in tutti i movimenti attivi e passivi e sono necessari per la completa libertà di movimento. Non possono realizzarsi in modo indipendente o volontariamente e, se ridotti, possono limitare i movimenti fisiologici dei segmenti corporei (3).
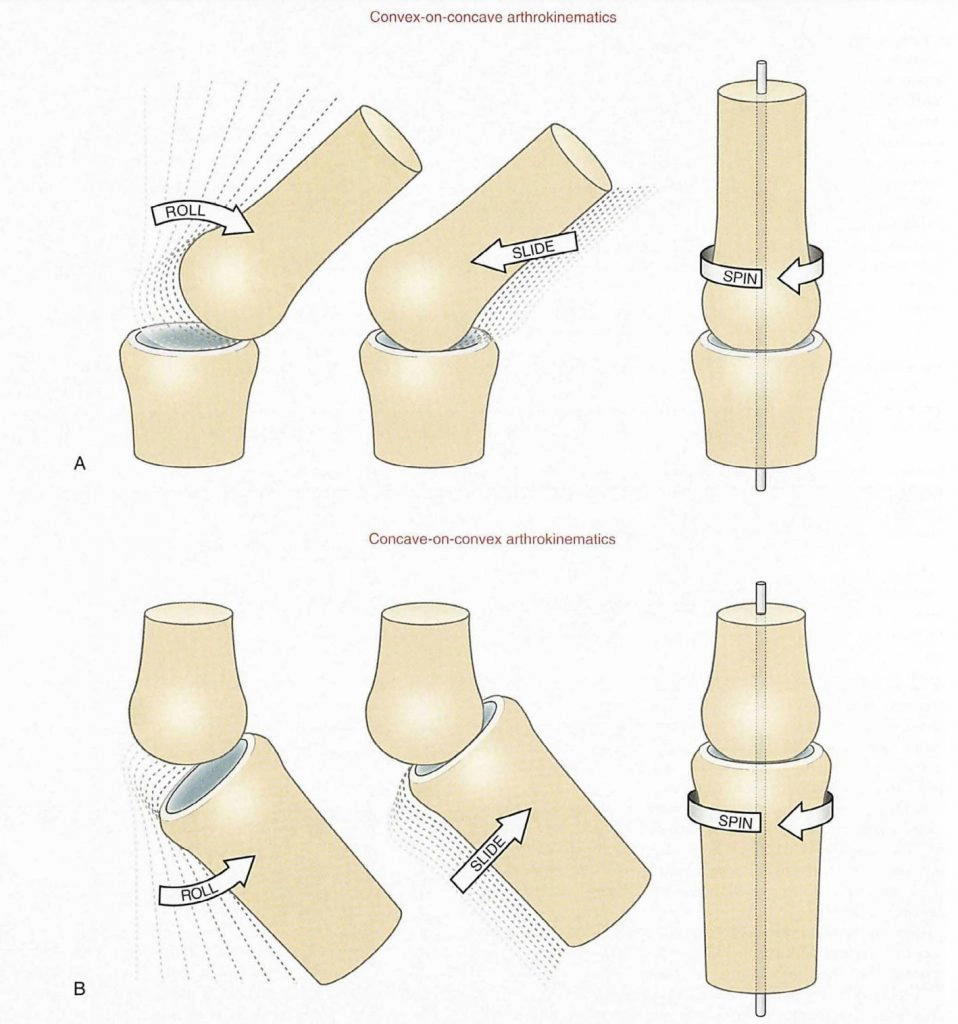
A livello di artrocinematica tre sono i movimenti possibili: uno traslatorio e due rotatori. Lo SLIDE, o GLIDE, si verifica quando un solo punto della superficie di una capo osseo entra in contatto con molteplici punti della superficie articolare opposta: è uno scivolamento. I movimenti angolari, sempre accoppiati a quelli traslatori, sono: il ROLL, che avviene quando molteplici punti della superficie di una capo osseo entrano in contatto con molteplici punti della superficie articolare opposta, e lo SPIN, che si verifica quando un solo punto della superficie di una capo osseo entra in contatto con un solo punto della superficie articolare opposta: è un movimento rotatorio di un segmento intorno al proprio asse (1).
Lo SLIDE può realizzarsi nella stessa direzione o in quella opposta rispetto al movimento del segmento osseo, mentre il ROLL, o SWING, avviene esclusivamente nella medesima direzione di movimento del segmento osseo (3). L’accoppiamento di movimenti traslatorio e rotatorio segue la Regola Concavo-Convesso, applicata clinicamente per la prima volta dall’anatomista MacConeill (4), al cui lavoro, insieme alle opere di Steindler (5), Maitland (6), e MacConaill-Basmajian (7) può essere fatta risalire l’idea che la morfologia delle superfici articolari sia strettamente correlata alla cinematica. Fu Freddy Kantelborn, nel 1959, a descrivere tale accoppiamento (8):
- quando una SUPERFICIE CONVESSA si muove su una concava o piana, si verificano ROLL e SLIDE in direzioni OPPOSTE,
- quando una SUPERFICIE CONCAVA si muove su una convessa, si verificano SWING e GLIDE nella STESSA direzione.
Differenza tra artrocinematica e osteocinematica
L’osteocinematica (dal greco ostéon = osso e kínema –atos = movimento), invece, studia i movimenti osservabili delle ossa nello spazio, rappresentati da un cambiamento dell’angolo tra segmenti scheletrici adiacenti (1). Un movimento osteocinematico è, per esempio, la flessione dorsale di caviglia, che si realizza a livello dell’articolazione tibio-tarsica e che ravvicina il dorso del piede alla faccia anteriore della gamba (9).
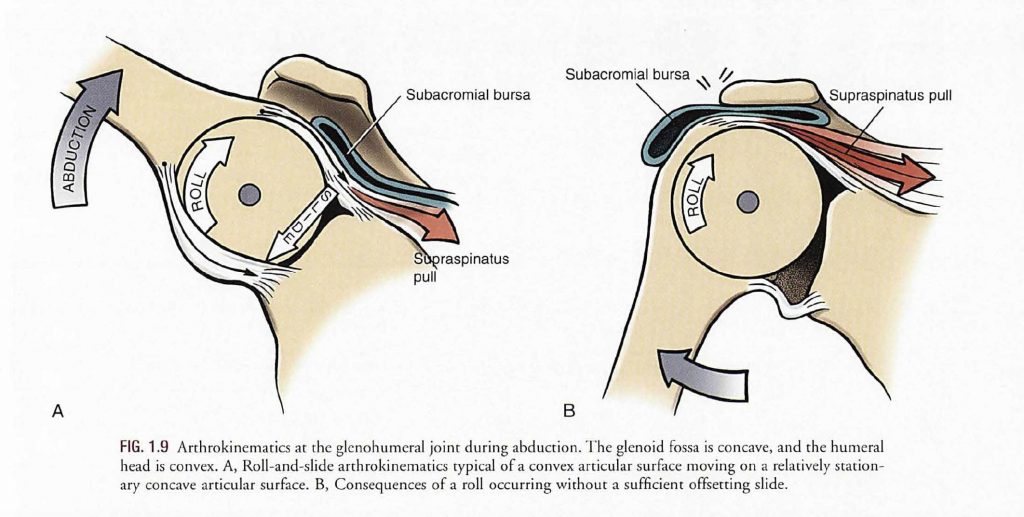
Quando tale movimento avviene in catena cinetica aperta, a livello artrocinematico è la superficie quasi cilindrica dell’astragalo che ruota anteriormente e trasla posteriormente rispetto al mortaio tibio-peroneale. In catena cinetica chiusa, invece, mentre a livello osteocinematico si osserva una flessione della gamba sul piede, secondo l’artrocinematica si realizzano swing e glide anteriori del partner concavo (estremità distale di tibia e perone) rispetto al partner convesso (tarso). Un altro esempio è l’abduzione di spalla: l’arto superiore si allontana dal tronco (oltre i 90° si riavvicina), su un piano frontale, attorno ad un asse antero-posteriore (9). Durante questo spostamento del braccio nello spazio, all’interno dell’articolazione gleno-omerale avvengono altri due movimenti, artrocinematici: la testa dell’omero (superficie convessa) si muove rispetto alla cavità glenoidea (superficie concava) eseguendo un ROLL superiore (medesima direzione di movimento del braccio) ed uno SLIDE inferiore (direzione opposta). Ciò, almeno, è quanto dovrebbe realizzarsi secondo la Regola Concavo-Convesso.
I limiti del modello artrocinematico
Nonostante tale regola artrocinematica abbia guidato, a partire dagli anni cinquanta, le tecniche di terapia manuale, la sua appropriatezza è stata messa in discussione da alcuni autori, che hanno dimostrato comportamenti diversi dei capi ossei (10), (11), (12). La letteratura in merito si è focalizzata sull’articolazione gleno-omerale, i cui movimenti artrocinematici sembrerebbero non rispettare gli accoppiamenti descritti da Kantelborn. I risultati di vari studi mostrano che la testa dell’omero resta quasi ferma, o trasla di 1-3 mm superiormente tra i 90° e i 120° di abduzione (10), (13), (14), comportamento in conflitto rispetto al pattern di roll e slide in direzioni opposte.
Tuttavia, esaminando nello specifico l’ampiezza della traslazione superiore rispetto alla dimensione della superficie articolare, si evidenzia come un’abduzione di 90° associata al solo movimento di rotolamento della testa omerale comporti, in teoria, uno spostamento craniale di 4 cm della testa dell’omero. Necessariamente, quindi, dovrebbe avvenire un scivolamento caudale per evitare un conflitto con la sovrastante struttura acromiale (15). Questo esempio di incongruenza tra teorie relative agli accoppiamenti artrocinematici porta l’autore a concludere che durante i movimenti la combinazione di roll e slide è simultanea, ma non necessariamente in proporzione. Nel caso dell’articolazione gleno-omerale, a causa delle dimensioni relative di testa omerale e cavità glenoidea, per consentire la completa escursione articolare, ad ogni grado di movimento il rotolamento è maggiore dello scivolamento (15).
Oltre a ciò, tale modello artrocinematico presenta limiti dovuti alla visione bidimensionale dei movimenti e alla considerazione della sola morfologia ossea di articolazioni sane. La realtà corporea, invece, è tridimensionale, ed i movimenti di scivolamento e rotolamento sono determinati non solo dalla forma delle superfici articolari, ma anche dai sistemi attivo e di controllo; la direzione della traslazione, per esempio, può essere influenzata dal complesso capsulo-legamentoso. Inoltre, articolazioni normali e disfunzionali potrebbero avere pattern artrocinematici differenti: strutture capsulari rigide, infatti, possono causare un movimento accessorio precoce e/o eccessivo in direzione opposta alla rigidità (15),(16).
Conclusione
Dunque, nonostante la Regola Concavo-Convesso abbia guidato le tecniche di Terapia Manuale sino ad ora, è forse giunto il momento di riflettere sui suoi limiti e rivalutare la trasferibilità clinica dei suoi postulati, tenendo conto di tutte le possibili componenti che influiscono sul movimento. Sarebbe più corretto considerarla per quello che è – la descrizione di patterns di movimento intra-articolari – e basarsi non esclusivamente sui suoi principi, ma anche sulle restrizioni capsulari e le tensioni legamentose e/o muscolari rilevate, per decidere in quale direzione applicare le tecniche manuali. Infatti, in assenza di un miglioramento clinico, nulla vieta di modificare i parametri della manovra utilizzata ricercando l’orientamento e l’intensità più efficaci.
Riprendendo le parole di Neumann: “La relazione concavo-convessa non è priva di errori, ma, se ben interpretata, può rappresentare la base per comprendere i meccanismi dell’artrocinematica” (15).
-
- Neumann, D.A. (2002). Kinesiology of the Musculoskeletal System (1st edition). U.S.A.: Mosby.
- Boccardi, S., & Lissoni, A. (1980). Cinesiologia I – II ‐ III (2nd edition). Italia: Seu.
- Kisner, C., & Colby, L.A. (2014). Esercizio terapeutico. Fondamenti e tecniche (3st edition). Italia: Piccin.
- MacConaill, M.A. (1953). The movements of bones and joints. The significance of shape. The Journal of Bone and Joint Surgery, 35B(2), 290-297.
- Steindler, A. (1955). Kinesiology of the Human Body Under Normal and Pathological Conditions (1st edition). U.S.A.: Charles C.
- Maitland, G.D. (1977). Peripheral Manipulation (2nd edition). U.S.A.: Butterworths.
- MacConaill, M.A, & Basmajian, J.V. (1969). Muscles and Movements: A Basis for Human Kinesiology (1st edition). U.S.A.: Williams & Wilkins Co.
- Kaltenborn, F.M., & Evjenth, O. (1989). Manual mobilization of the extremity joints. Basic examination and treatment techniques (4th edition). Norway: Olaf Norlin Bokhandel.
- Kapandji, I.A. (1999). Fisiologia Articolare – Arto Superiore – Arto Inferiore (5th edition). Francia: Maloine – Monduzzi.
- Johnson, A.J., Godges, J.J., Zimmerman, G.J., & Ounanian, L.L. (2007). The effect of anterior versus posterior glide joint mobilization on external rotation range of motion in patients with shoulder adhesive capsulitis. Journal of Orthopaedic & Sports Physical Therapy, 37, 88-99.
- Ludewig, P.M., & Cook, T.M. (2002). Translations of the humerus in persons with shoulder impingement symptoms. Journal of Orthopaedic & Sports Physical Therapy, 32, 248-259.
- Harryman, D.T., Sidles, J.A., Clark, J.M., McQuade, K.J., Gibb, T.D., & Matsen, F.A. (1990). Translation of the humeral head on the glenoid with passive glenohumeral motion. The Journal of Bone and Joint Surgery. American Volume, 72, 1334-1343.
- Deutsch, A., Altchek, D.W., Schwartz, E., Otis, J.C., & Warren, R.F. (1996). Radiologic measurement of superior displacement of the humeral head in the impingement syndrome. Journal of Shoulder and Elbow Surgery, 5, 186-193.
- Matsuki, K., Matsuki, K.O., Yamaguchi, S., Nobuyasu, O., Takahisa, S., Hiroyuki, S., Tomaki, T., Yuichi, W., Kazuhisa, T., & Scott, A.B. (2012). Dynamic in vivo glenohumeral kinematics during scapular plane abduction in healthy shoulders. Journal of Orthopaedic & Sports Physical Therapy, 42, 96-104.
- Neumann, D.A. (2012). The convex-concave rules of arthrokinematics: Flawed or perhaps just misinterpreted? Journal of Orthopaedic & Sports Physical Therapy, 42(2), 53-55.
- Brandt, C., Sole, G., Krause, M.W., & Nel, M. (2007). An evidence-based reviw on the validity of the Kaltenborn rule as applied to the glenohumeral joint. Manual Therapy, 12(1), 3-11.